
Foreword:
I recently gave a presentation at “Texas Talks,” our mini-conference for partners. The talk was focused on “The Next Big Thing”, or what we’re working on to leverage recent advances in robotic machine learning (LLMs, VLAs, RFMs, &c). I made the slides and gave the talk, and afterwards asked Microsoft Co-Pilot to make a blog post from it.
The generated blog post follows (with minor corrections), and it’s a good introduction to our new project, internally codenamed “Theia”. It tells you what Theia is, but less so why Theia is. So I’m writing this foreword to clarify that a bit.
First, we agree with the general zeitgeist: The robots are coming.
Specifically, recent and ongoing advances in machine learning, data collection, teleoperation, video analysis, linguistic modeling, sensors, actuators, and all the other bits of technology that are required for generalized learning robots have and will continue to move the field forward by leaps and bounds.
The robots are coming. But they are not here.
How long it will take for them to arrive is a matter of some debate. Rodney Brooks (my academic great-grandfather) puts useful humanoid robots at least 10 years out. Useful learning-based non-humanoid robots might be sooner. But when I look at the pace of investment in startups claiming to build general-purpose robots, I suspect that many people believe that it’ll be more like 2-3 years.
Rod may be right. The investors may be right. Or they can all be wrong. I’ll remind the readers that self-driving cars have been worked on since the 1990s but 30 years later I still drove myself to work this morning.
So, the robots are coming. But they are not here. Yet.
Theia is the answer to the question “What do we do while we wait?” Work still needs to be done, warehouses still need to get automated today, before these wonderful new robots arrive. Theia is a plan to connect the robots of today (single-purpose, adaptive autonomy) with those of the future (general-purpose, universal autonomy). Theia is a framework for expanding automation capabilities in both embodiment and task space as new technologies are being developed, allowing us to reap the benefits of these technologies as they develop, rather than wait for a wholly finished product.
You can wait for the new world to arrive, or you can build a bridge to it.
We’re building a bridge. The details are below.
Project Theia: One Mind, Many Limbs
A Framework for Robots That Learn, Adapt, and Scale
Industrial robotics has always been a story about managing variability. From early mechanical arms repeating the same motion endlessly to today’s AI-powered systems navigating complex warehouses, the central challenge has remained the same: how do we build robots that perform reliably when the world refuses to stay predictable?
At Plus One Robotics, we believe the next phase of physical AI requires a shift in how robots learn, how they adapt, and how they work together. We’ve codenamed this framework Theia—after the Titan of sight—because seeing, understanding, and reacting to the world is at the heart of autonomous intelligence.
From Mechanisms to Learning Systems
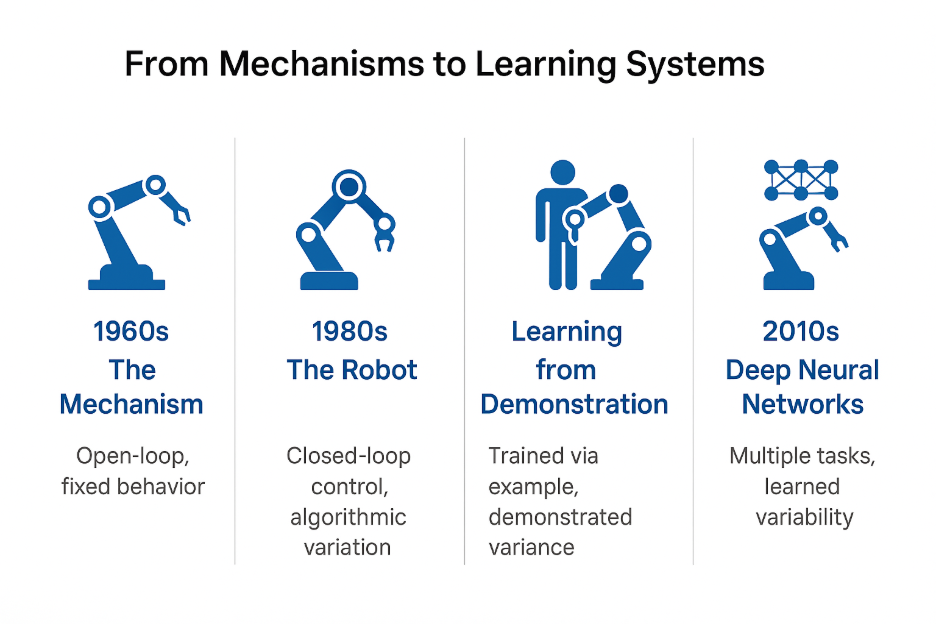
The first industrial robots were marvels of engineering—but also extremely limited.
1960s: The Mechanism
Unimate, installed at General Motors in 1961, operated entirely in open loop. No sensing. No feedback. It worked only because the environment never changed.
1980s: The Robot
Vision-guided systems emerged, enabling closed-loop control. Robots could now handle algorithmic variation—like tracking a seam or following a known path—but only within tightly defined tasks.
1990s: Learning from Demonstration
Systems trained via example could manage demonstrated variance. If a human showed the robot what to do, the robot could generalize—slightly.
2010s: Deep Neural Networks
Deep learning expanded robot perception dramatically. Robots could now handle variance across multiple tasks, such as bin picking and anomaly detection. But the learning was still largely static.
Each step expanded the robot’s ability to cope with variability—but also revealed a deeper limitation.
The Core Problem: Unknown Scenario Variability
In real workplaces, robots face environments we cannot fully model in advance. New products appear. Lighting changes. Bags crumple differently. Exceptions happen constantly.
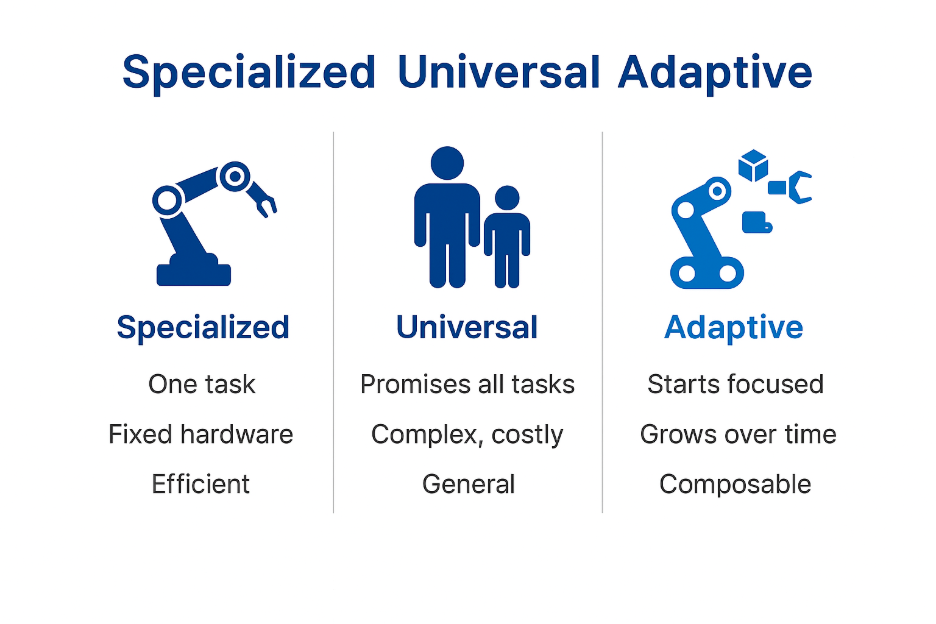
Traditional approaches tried two extremes:
- Specialized models: constrain the world, learn once, deploy forever.
- Universal models: learn everything from all data and hope it generalizes.
Both approaches struggle at scale. Specialized models struggle at large scales, when the environment becomes too large and uncontrolled. Universal models struggle at small scales, when the scenario is so unique that it’s not covered by the training data.
In practice, the most effective systems are adaptive:
- Start specialized
- Capture observed variance
- Grow and iterate over time
This realization led us to a critical insight:
Learned autonomy is not a step—it’s a process.
Theia: A Learning Framework, Not a Single Model
Theia is a framework designed to manage:
- Unknown scenario variability
- Incrementally changing embodiments
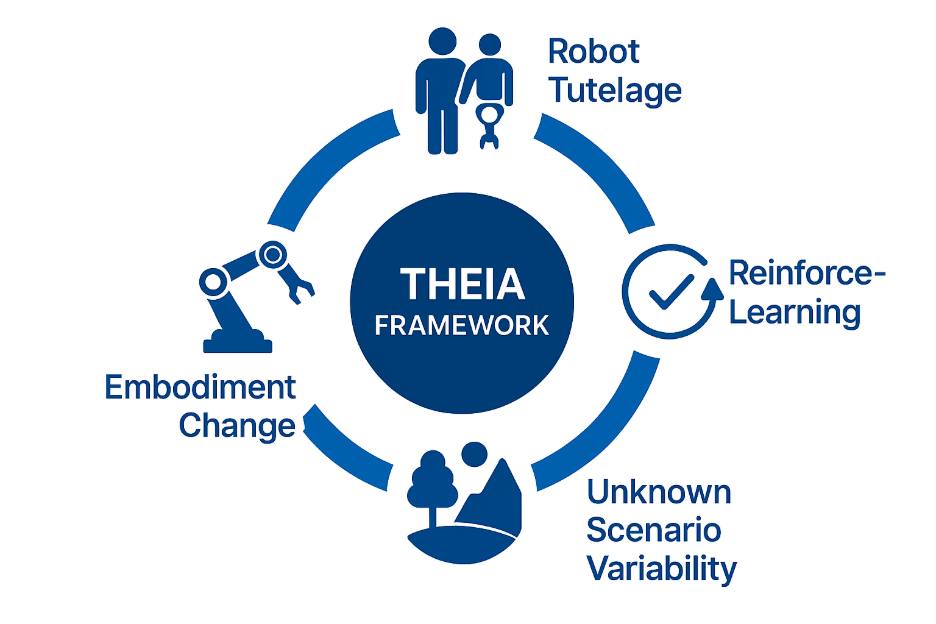
It’s built on four pillars:
1. Robot Tutelage
Human-in-the-loop learning, where people:
- Provide examples and feedback
- Observe robot behavior
- Iterate collaboratively
Tutelage increases uptime by letting humans immediately resolve issues, and it accelerates learning in the real world, turning exceptions into expectations.
2. Reinforcement Learning
Robots continuously measure performance and adapt behavior to improve outcomes—driving higher throughput and resilience.
3. Unknown Scenario Variability
Instead of assuming we can pre-model every situation, Theia is designed to learn from surprises, via reinforcement learning and robot tutelage, reducing faults rather than being derailed by them.
4. Incrementally Changing Embodiments
Sensors and actuators aren’t fixed forever. Tools, cameras, grippers, and mobility systems evolve. Theia treats embodiment as something that can change and grow, not a fixed constraint.
Embodiment: The Next Dimension of Variability
Just as tasks vary, so do robot bodies.
We see the industry splitting along familiar lines:
- Specialized embodiments: optimized for one task, one environment
- “Universal” embodiments: general-purpose humanoids promising everything everywhere
But again, the most powerful approach may be adaptive embodiment:
- Start with focused hardware
- Add capabilities as needed
- Grow with the task, not ahead of it
Embodiment and task inform each other. The right body depends on what you need to do—and the task itself evolves over time.
One Mind, Many Limbs
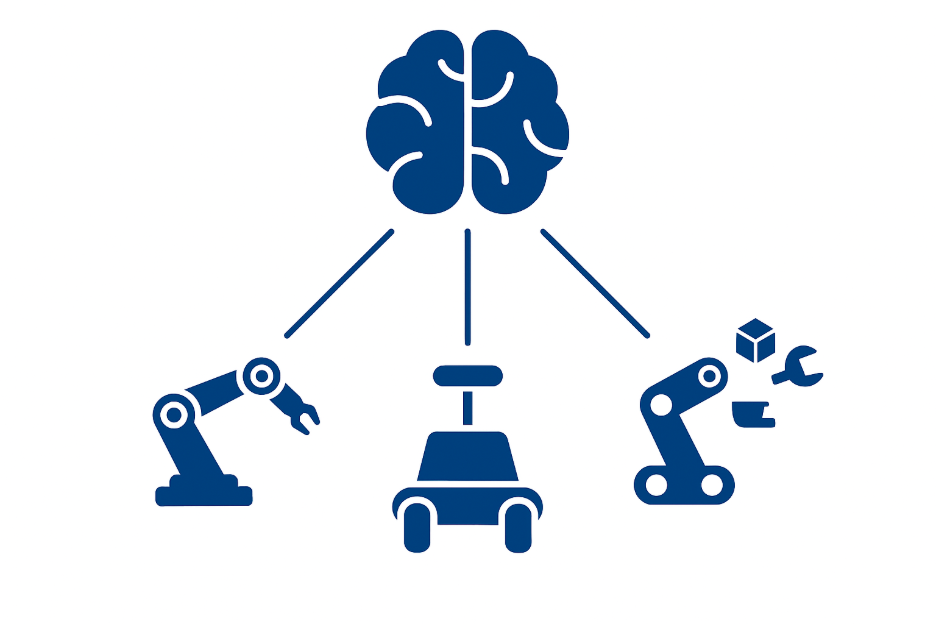
As robotic systems scale, a new challenge emerges: coordination, or orchestration between parts of a whole.
Most physical AI systems today focus on single robots acting independently. But real-world automation increasingly involves:
- Multiple physical robot types and instances
- Shared spaces
- Implicit coordination between them
Theia addresses this by unifying all of the disparate physical parts into a single entity. It in effect acts as an orchestration layer, in the same way that your mind orchestrates your hands and your feet.
This is where real scale begins—not just smarter robots, but smarter systems of multiple parts working together as one.
Why This Matters
External industry analysis reinforces this direction: multi-robot coordination is widely recognized as the missing piece in physical AI. Whoever solves orchestration first will define how autonomous robot fleets scale across industries.
Theia isn’t a robot. It isn’t a single model. It’s a way of thinking about autonomy as something that learns continuously, adapts deliberately, and scales coherently across minds and bodies.
Learn more about Plus One
